#include <vvl_controller.h>

Public Types | |
| using | interface_t = VvlController |
Public Member Functions | |
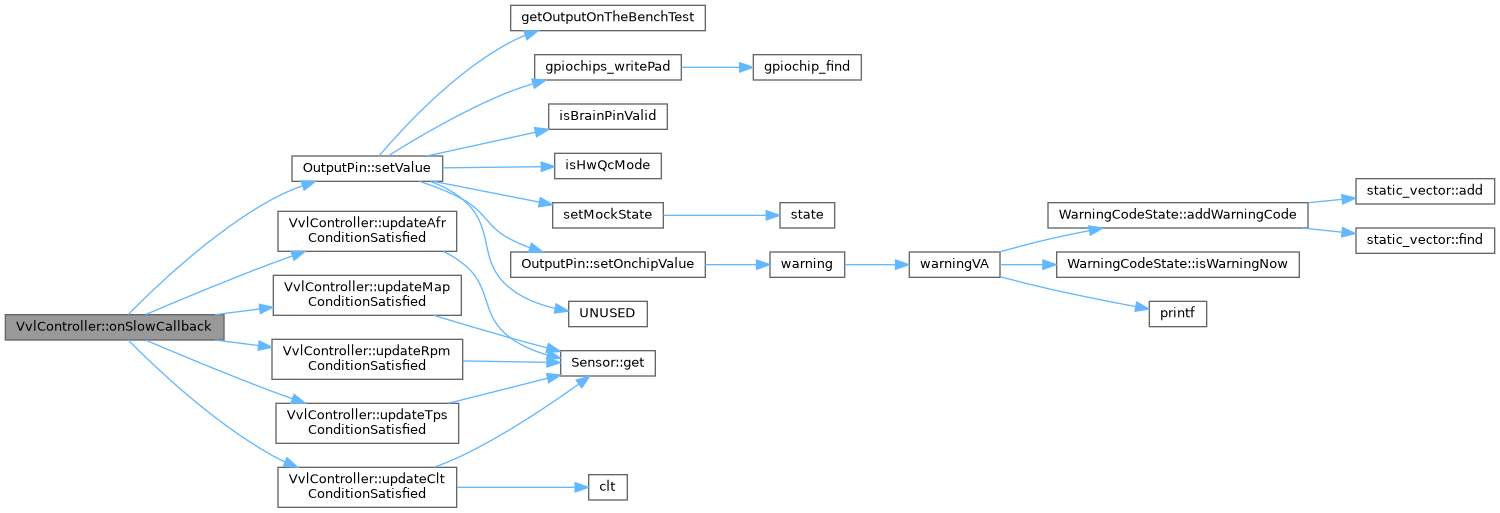
| void | onSlowCallback () override |
| float | getFuelCoefficient () const |
| float | getTimingModifier () const |
 Public Member Functions inherited from EngineModule Public Member Functions inherited from EngineModule | |
| virtual void | initNoConfiguration () |
| virtual void | setDefaultConfiguration () |
| virtual void | onConfigurationChange (engine_configuration_s const *) |
| virtual void | onFastCallback () |
| virtual void | onEngineStop () |
| virtual void | onIgnitionStateChanged (bool) |
| virtual bool | needsDelayedShutoff () |
| virtual void | onEnginePhase (float, efitick_t, angle_t, angle_t) |
Private Member Functions | |
| void | updateTpsConditionSatisfied () |
| void | updateCltConditionSatisfied () |
| void | updateMapConditionSatisfied () |
| void | updateAfrConditionSatisfied () |
| void | updateRpmConditionSatisfied () |
Additional Inherited Members | |
| Data Fields inherited from vvl_controller_state_s | |
| bool | isVvlTpsCondition: 1 {} |
| bool | isVvlCltCondition: 1 {} |
| bool | isVvlMapCondition: 1 {} |
| bool | isVvlAfrCondition: 1 {} |
| bool | isVvlRpmCondition: 1 {} |
| bool | isVvlCondition: 1 {} |
| bool | unusedBit_6_6: 1 {} |
| bool | unusedBit_6_7: 1 {} |
| bool | unusedBit_6_8: 1 {} |
| bool | unusedBit_6_9: 1 {} |
| bool | unusedBit_6_10: 1 {} |
| bool | unusedBit_6_11: 1 {} |
| bool | unusedBit_6_12: 1 {} |
| bool | unusedBit_6_13: 1 {} |
| bool | unusedBit_6_14: 1 {} |
| bool | unusedBit_6_15: 1 {} |
| bool | unusedBit_6_16: 1 {} |
| bool | unusedBit_6_17: 1 {} |
| bool | unusedBit_6_18: 1 {} |
| bool | unusedBit_6_19: 1 {} |
| bool | unusedBit_6_20: 1 {} |
| bool | unusedBit_6_21: 1 {} |
| bool | unusedBit_6_22: 1 {} |
| bool | unusedBit_6_23: 1 {} |
| bool | unusedBit_6_24: 1 {} |
| bool | unusedBit_6_25: 1 {} |
| bool | unusedBit_6_26: 1 {} |
| bool | unusedBit_6_27: 1 {} |
| bool | unusedBit_6_28: 1 {} |
| bool | unusedBit_6_29: 1 {} |
| bool | unusedBit_6_30: 1 {} |
| bool | unusedBit_6_31: 1 {} |
Detailed Description
Definition at line 12 of file vvl_controller.h.
Member Typedef Documentation
◆ interface_t
Definition at line 14 of file vvl_controller.h.
Member Function Documentation
◆ getFuelCoefficient()
| float VvlController::getFuelCoefficient | ( | ) | const |
Definition at line 27 of file vvl_controller.cpp.
Referenced by getRunningFuel().

◆ getTimingModifier()
| float VvlController::getTimingModifier | ( | ) | const |
Definition at line 35 of file vvl_controller.cpp.
Referenced by getRunningAdvance().

◆ onSlowCallback()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 11 of file vvl_controller.cpp.
◆ updateAfrConditionSatisfied()
|
private |
Definition at line 70 of file vvl_controller.cpp.
Referenced by onSlowCallback().


◆ updateCltConditionSatisfied()
|
private |
Definition at line 52 of file vvl_controller.cpp.
Referenced by onSlowCallback().

◆ updateMapConditionSatisfied()
|
private |
Definition at line 61 of file vvl_controller.cpp.
Referenced by onSlowCallback().


◆ updateRpmConditionSatisfied()
|
private |
Definition at line 88 of file vvl_controller.cpp.
Referenced by onSlowCallback().


◆ updateTpsConditionSatisfied()
|
private |
Definition at line 43 of file vvl_controller.cpp.
Referenced by onSlowCallback().


The documentation for this class was generated from the following files:
- controllers/modules/vvl_controller/vvl_controller.h
- controllers/modules/vvl_controller/vvl_controller.cpp