Functions | |
| static void | setInjectorPins () |
| Board-specific configuration defaults. | |
| Gpio | getWarningLedPin () |
| Gpio | getCommsLedPin () |
| Gpio | getRunningLedPin () |
| static void | setIgnitionPins () |
| static void | s105_boardDefaultConfiguration () |
| static void | setupVbatt () |
| static void | s105_boardConfigOverrides () |
| float | getAnalogInputDividerCoefficient (adc_channel_e hwChannel) |
| void | setup_custom_board_overrides () |
Function Documentation
◆ getAnalogInputDividerCoefficient()
| float getAnalogInputDividerCoefficient | ( | adc_channel_e | hwChannel | ) |
Definition at line 112 of file board_configuration.cpp.
112 {
113 switch (hwChannel) {
114 /* MAP, TPS, MAF (na), AC press (na) */
115 case EFI_ADC_0:
116 case EFI_ADC_1:
117 case EFI_ADC_11:
118 case EFI_ADC_6:
119 return (22.0 + 41.2) / 41.2;
120
121 /* IAT, CLT */
122 case EFI_ADC_3:
123 case EFI_ADC_14:
124 /* no divider, 1.5K pull-up to 3.3V, 22K pull-down */
125 /* TODO: handle both pull-up and pull-down */
126 return 1.0;
127
128 /* AFR 1, AFR 2 (na), knock (TBD) */
129 case EFI_ADC_7:
130 case EFI_ADC_5:
131 case EFI_ADC_2:
132 /* no divider */
133 return 1.0;
134
135 /* +12 sense, Ignition switch */
136 case EFI_ADC_9:
137 case EFI_ADC_8:
138 return (68.0 + 6.8) / 6.8;
139
140 /* 5V feedback */
141 case EFI_ADC_10:
142 return (10.0 + 10.0) / 10.0;
143
144 /* Ignition feedback */
145 case EFI_ADC_12:
146 case EFI_ADC_13:
147 /* TBD */
148 return 1.0;
149
150 default:
152 }
154}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:81
float analogInputDividerCoefficient
◆ getCommsLedPin()
| Gpio getCommsLedPin | ( | ) |
See https://rusefi.com/s/super-uaefi
See https://rusefi.com/s/uaefi121
Definition at line 27 of file board_configuration.cpp.
◆ getRunningLedPin()
| Gpio getRunningLedPin | ( | ) |
Definition at line 32 of file board_configuration.cpp.
◆ getWarningLedPin()
| Gpio getWarningLedPin | ( | ) |
Definition at line 22 of file board_configuration.cpp.
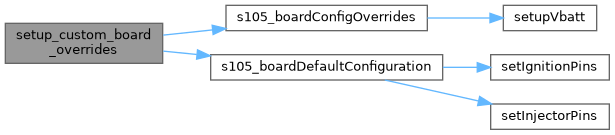
◆ s105_boardConfigOverrides()
|
static |
Definition at line 100 of file board_configuration.cpp.
100 {
101 setupVbatt();
102
103 //1.5K
106
107 //CAN 1 bus overwrites
110}
@ A12
@ A11
thermistor_conf_s config
ThermistorConf iat
ThermistorConf clt
Gpio canRxPin
Gpio canTxPin
float bias_resistor
Referenced by setup_custom_board_overrides().
Here is the call graph for this function:

Here is the caller graph for this function:

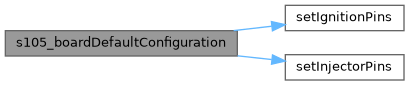
◆ s105_boardDefaultConfiguration()
|
static |
Definition at line 45 of file board_configuration.cpp.
45 {
46 setInjectorPins();
47 setIgnitionPins();
48
51
52 // No LEDs on this board, do we need some unused pin tp toggle? PC14 of LSI did not work for blinking, any better alternatives?
53
58 //engineConfiguration->idle.solenoidPin = ?
62 //engineConfiguration->mainRelayPin = ?;
64
67
71
73
81}
@ B10
@ E14
@ B8
@ D6
air_pressure_sensor_config_s sensor
adc_channel_e adcChannel
adc_channel_e hwChannel
adc_channel_e hwChannel
vehicle_info_t engineMake
pin_output_mode_e malfunctionIndicatorPinMode
adc_channel_e tps1_1AdcChannel
MAP_sensor_config_s map
afr_sensor_s afr
pin_output_mode_e mainRelayPinMode
ignition_mode_e ignitionMode
pin_output_mode_e tachOutputPinMode
idle_hardware_s idle
pin_output_mode_e fanPinMode
output_pin_e fanPin
uint32_t cylindersCount
bool verboseCan
injection_mode_e crankingInjectionMode
output_pin_e tachOutputPin
brain_input_pin_e triggerInputPins[TRIGGER_INPUT_PIN_COUNT]
output_pin_e malfunctionIndicatorPin
adc_channel_e mafAdcChannel
firing_order_e firingOrder
injection_mode_e injectionMode
vehicle_info_t engineCode
pin_output_mode_e solenoidPinMode
Referenced by setup_custom_board_overrides().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ setIgnitionPins()
|
static |
Definition at line 36 of file board_configuration.cpp.
36 {
41
43}
@ D15
@ D12
@ D14
@ D13
pin_output_mode_e ignitionPinMode
output_pin_e ignitionPins[MAX_CYLINDER_COUNT]
◆ setInjectorPins()
|
static |
Board-specific configuration defaults.
Definition at line 13 of file board_configuration.cpp.
13 {
18
20}
@ D10
@ D9
@ D8
@ D11
output_pin_e injectionPins[MAX_CYLINDER_COUNT]
pin_output_mode_e injectionPinMode
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 156 of file board_configuration.cpp.
156 {
159}
std::optional< setup_custom_board_overrides_type > custom_board_ConfigOverrides
Definition engine_configuration.cpp:71
std::optional< setup_custom_board_overrides_type > custom_board_DefaultConfiguration
Definition engine_configuration.cpp:70
static void s105_boardDefaultConfiguration()
Definition board_configuration.cpp:45
static void s105_boardConfigOverrides()
Definition board_configuration.cpp:100
Here is the call graph for this function:
◆ setupVbatt()
|
static |
Definition at line 83 of file board_configuration.cpp.
83 {
84 // There are two different input dividers:
85 // 22K (high) + 22K (low) on IAT and CLT
86 // 22K (high) + 41.2K (low) on TPS and MAP
88 // TODO: TPS and MAP
89 //engineConfiguration->analogInputDividerCoefficient = (22.0 + 41.2) / 22.0;
90
91 // 68K + 6.8k
93
94 // pin input +12 from Main Relay
96
98}
float adcVcc
float vbattDividerCoeff
adc_channel_e vbattAdcChannel