Functions | |
| static void | icuperiodcb (ICUDriver *icup, size_t index) |
| static void | icuovercapture (ICUDriver *icup, size_t index) |
| static void | icuperiodcb_in1 (ICUDriver *icup) |
| static void | icuovercapture_in1 (ICUDriver *icup) |
| void | startSent () |
| void | stopSent () |
Variables | |
| static uint16_t | lastPulse [SENT_INPUT_COUNT] |
| static bool | overcapture [SENT_INPUT_COUNT] |
| static ICUConfig | icucfg [SENT_INPUT_COUNT] |
Function Documentation
◆ icuovercapture()
|
static |
Definition at line 62 of file sent_hw_icu.cpp.
Referenced by icuovercapture_in1().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ icuovercapture_in1()
|
static |
Definition at line 74 of file sent_hw_icu.cpp.
75{
76 icuovercapture(icup, 0);
77}
static void icuovercapture(ICUDriver *icup, size_t index)
Definition sent_hw_icu.cpp:62
Here is the call graph for this function:

◆ icuperiodcb()
|
static |
Definition at line 34 of file sent_hw_icu.cpp.
35{
36 uint16_t clocks;
37 uint8_t flags = 0;
39
41 /* channel 1 and channel 2 supports period measurements */
42 clocks = icuGetPeriodX(icup);
43 } else {
44 /* this is freerunnig timer and we need to calculate period using just captured timer value and previous one */
45 /* TODO: support 32 bit timers too? */
46 uint16_t val = icuGetWidthX(icup);
47
48 /* can overflow */
49 clocks = val - lastPulse[index];
50
51 lastPulse[index] = val;
52 }
53
55 flags |= SENT_FLAG_HW_OVERFLOW;
57 }
58
59 SENT_ISR_Handler(index, clocks, flags);
60}
void SENT_ISR_Handler(uint8_t channel, uint16_t clocks, uint8_t flags)
Definition sent.cpp:73
Referenced by icuperiodcb_in1().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ icuperiodcb_in1()
|
static |
Definition at line 69 of file sent_hw_icu.cpp.
Here is the call graph for this function:

◆ startSent()
| void startSent | ( | ) |
Definition at line 95 of file sent_hw_icu.cpp.
95 {
96 for (int i = 0; i < SENT_INPUT_COUNT; i++) {
98
100 continue;
101 }
102
103 ICUConfig *cfg = &icucfg[i];
104 ICUDriver *icu;
105 iomode_t pinAF;
106 uint32_t baseClock;
107
109 /* this pin has no ICU functionality or ICU driver is not enabled for TIM on this pin */
110 criticalError("No ICU on selected SENT pin");
111 continue;
112 }
113
115
116 icuStart(icu, cfg);
117 icuStartCapture(icu);
118 icuEnableNotifications(icu);
119 }
120}
void efiSetPadMode(const char *msg, brain_pin_e brainPin, iomode_t mode)
Definition bootloader_main.cpp:207
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:81
bool getIcuParams(brain_pin_e hwPin, iomode_t *af_ptr, ICUDriver **icu_ptr, icuchannel_t *channel_ptr, uint32_t *clock_ptr)
Definition stm32_icu.cpp:122
sent_input_pin_e sentInputPins[SENT_INPUT_COUNT]
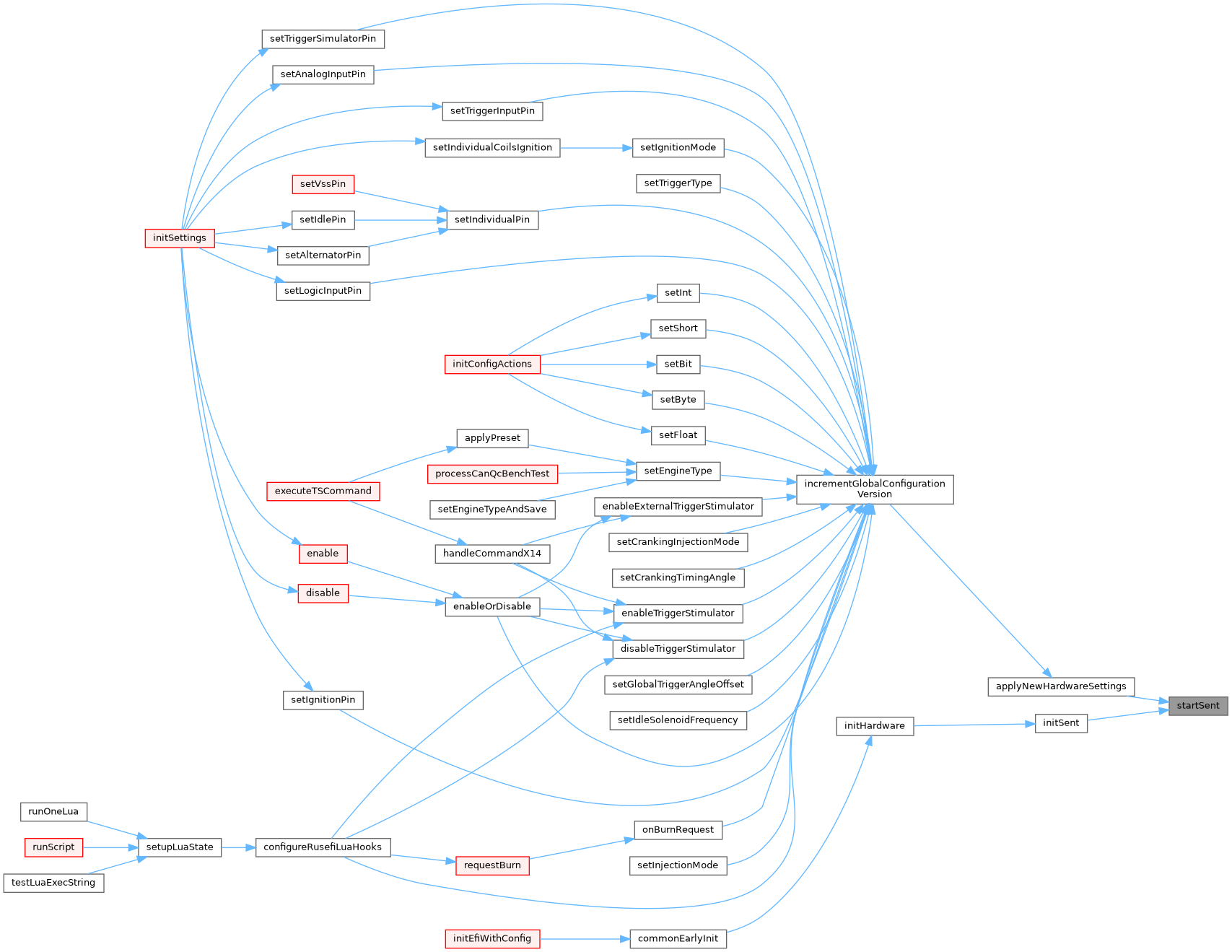
Referenced by applyNewHardwareSettings(), and initSent().
Here is the call graph for this function:
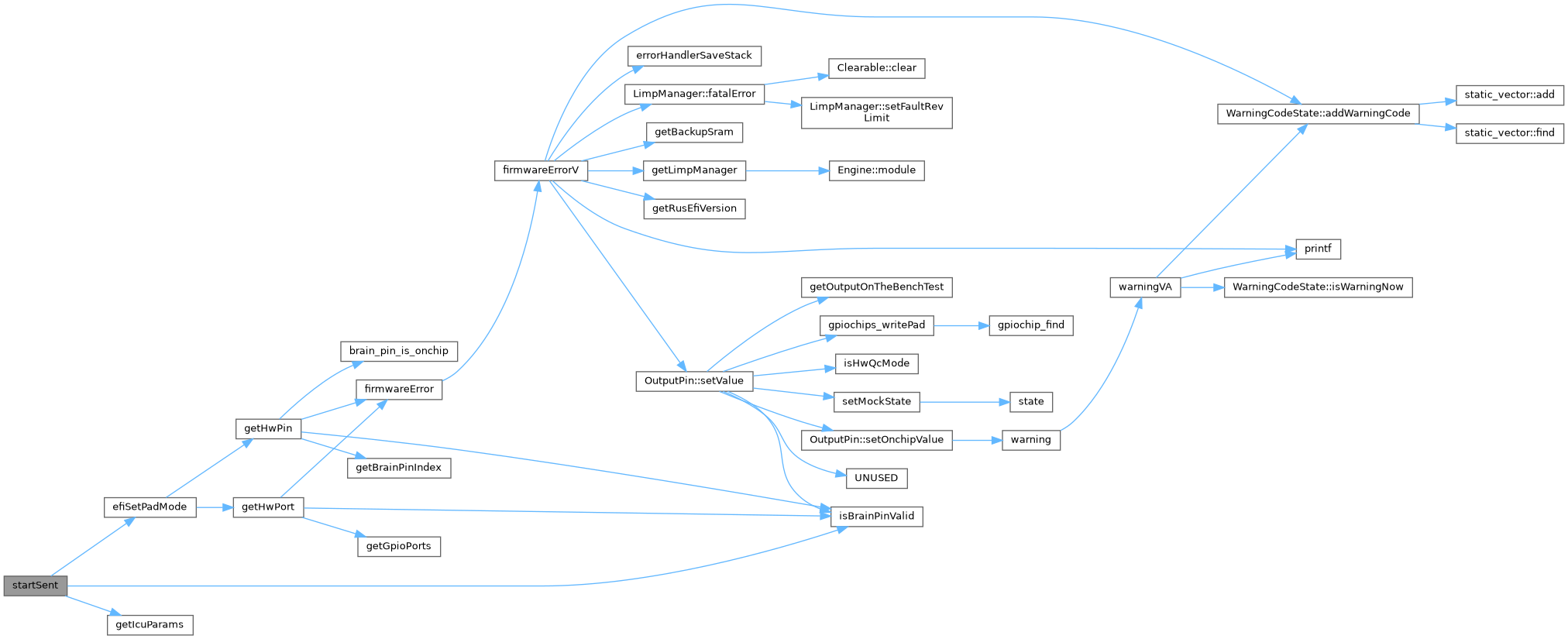
Here is the caller graph for this function:
◆ stopSent()
| void stopSent | ( | ) |
Definition at line 122 of file sent_hw_icu.cpp.
122 {
123 for (int i = 0; i < SENT_INPUT_COUNT; i++) {
125
127 continue;
128 }
129
130 ICUDriver *icu;
131
133 /* this pin has no ICU functionality or ICU driver is not enabled for TIM on this pin */
134 /* throw error? */
135 continue;
136 }
137
138 icuDisableNotifications(icu);
139 icuStopCapture(icu);
140 icuStop(icu);
141
142 efiSetPadUnused(sentPin);
143 }
144}
engine_configuration_s & activeConfiguration
Definition engine_configuration.cpp:84
Referenced by applyNewHardwareSettings().
Here is the call graph for this function:
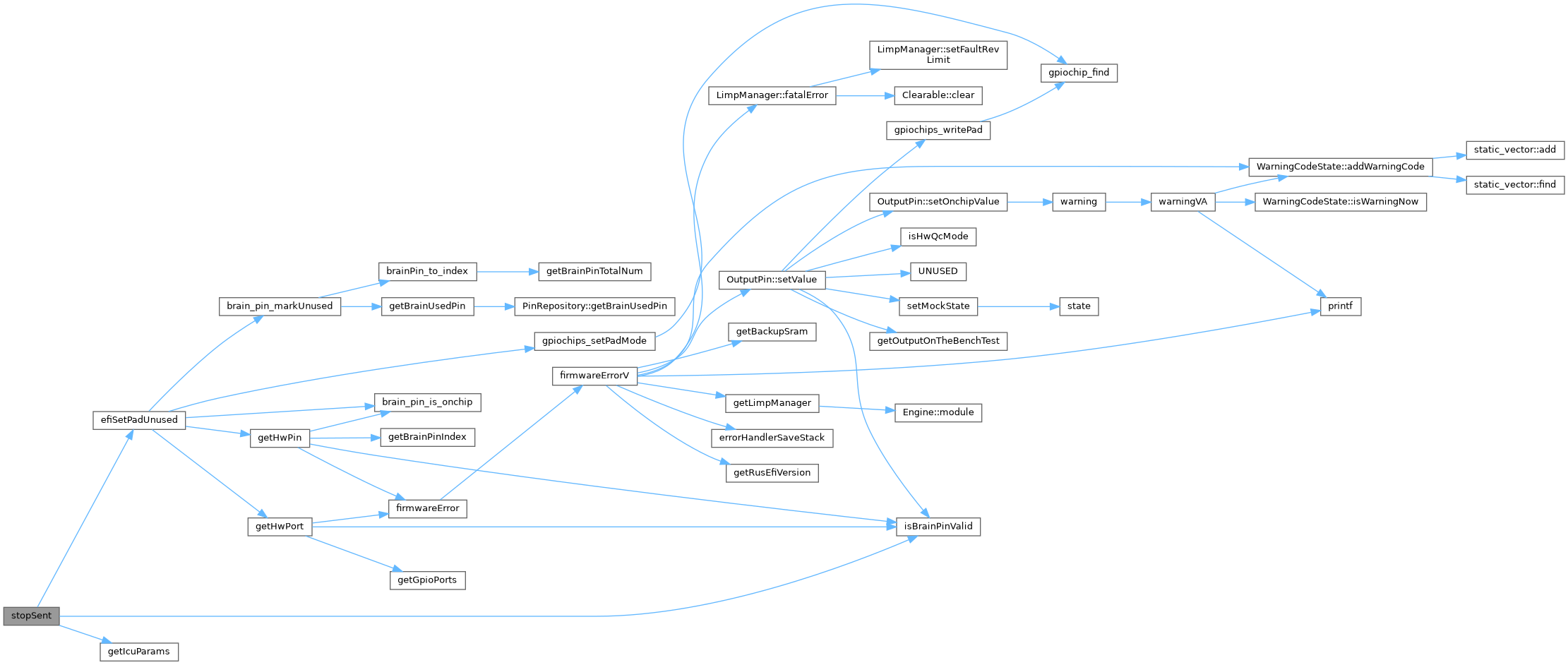
Here is the caller graph for this function:

Variable Documentation
◆ icucfg
|
static |
Initial value:
=
{
{
.mode = ICU_INPUT_ACTIVE_LOW,
.frequency = SENT_ICU_FREQ,
.width_cb = NULL,
.period_cb = icuperiodcb_in1,
.overflow_cb = NULL,
.channel = ICU_CHANNEL_1,
.dier = 0U,
.arr = 0xFFFFFFFFU,
.overcapture_cb = icuovercapture_in1,
}
}
Definition at line 80 of file sent_hw_icu.cpp.
81{
82 {
83 .mode = ICU_INPUT_ACTIVE_LOW,
84 .frequency = SENT_ICU_FREQ,
85 .width_cb = NULL,
86 .period_cb = icuperiodcb_in1,
87 .overflow_cb = NULL,
88 .channel = ICU_CHANNEL_1, /* will be overwriten on startSent() */
89 .dier = 0U,
90 .arr = 0xFFFFFFFFU,
91 .overcapture_cb = icuovercapture_in1,
92 }
93};
Referenced by icuperiodcb(), and startSent().
◆ lastPulse
|
static |
Definition at line 31 of file sent_hw_icu.cpp.
Referenced by icuperiodcb().
◆ overcapture
|
static |
Definition at line 32 of file sent_hw_icu.cpp.
Referenced by icuovercapture(), and icuperiodcb().