#include <trigger_structure.h>
Collaboration diagram for TriggerFormDetails:
Public Member Functions | |
| void | prepareEventAngles (TriggerWaveform *shape) |
Data Fields | |
| angle_t | eventAngles [2 *PWM_PHASE_MAX_COUNT] |
Detailed Description
Misc values calculated from TriggerWaveform
Definition at line 260 of file trigger_structure.h.
Member Function Documentation
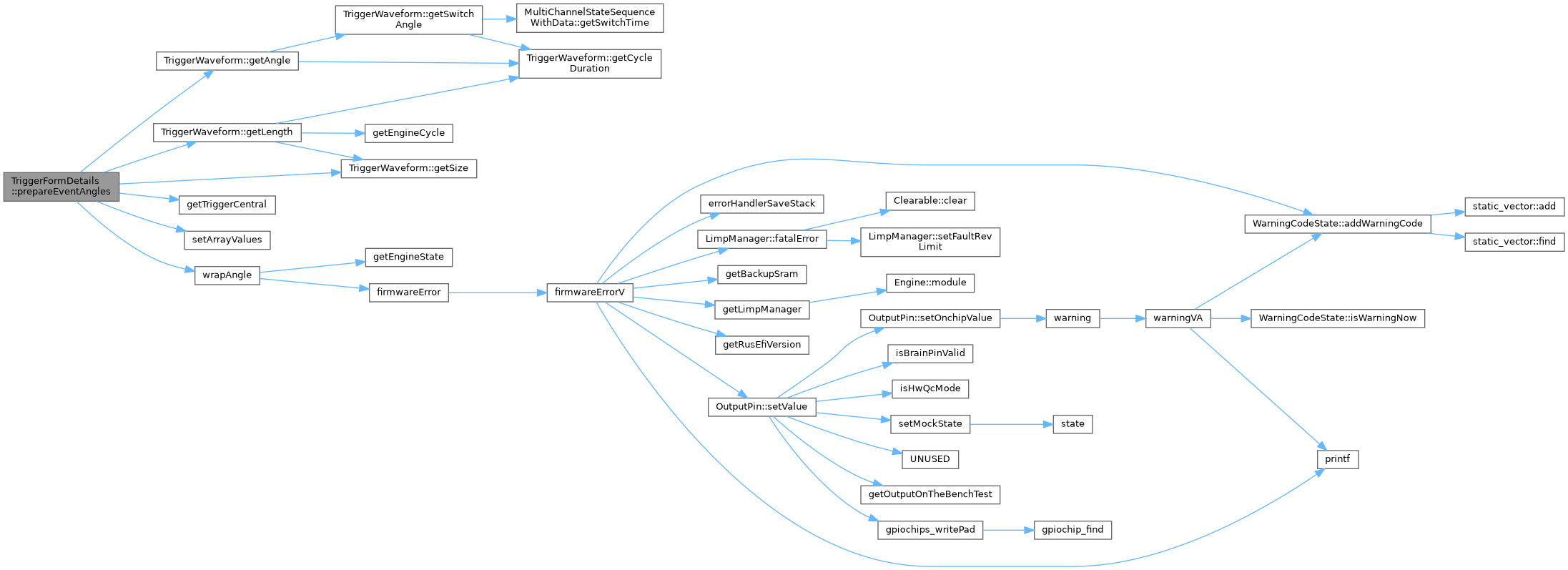
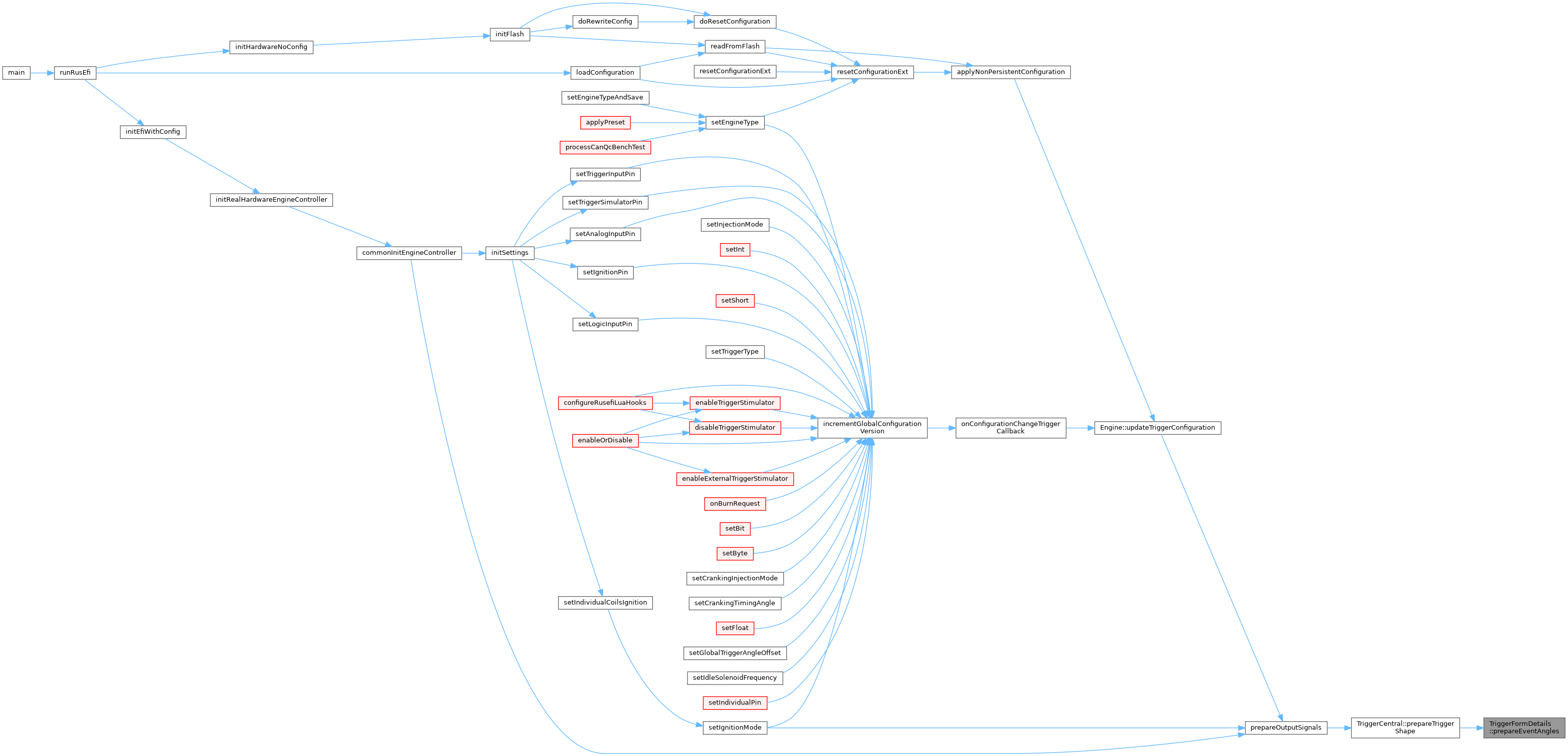
◆ prepareEventAngles()
| void TriggerFormDetails::prepareEventAngles | ( | TriggerWaveform * | shape | ) |
Definition at line 117 of file trigger_decoder.cpp.
117 {
119 if (triggerShapeSynchPointIndex == EFI_ERROR_CODE) {
120 return;
121 }
124
126
128
129 // this may be <length for some triggers like symmetrical crank Miata NB
131
132 assertAngleRange(triggerShapeSynchPointIndex, "triggerShapeSynchPointIndex", ObdCode::CUSTOM_TRIGGER_SYNC_ANGLE2);
133 efiAssertVoid(ObdCode::CUSTOM_TRIGGER_CYCLE, getTriggerCentral()->engineCycleEventCount != 0, "zero engineCycleEventCount");
134
137 // explicit check for zero to avoid issues where logical zero is not exactly zero due to float nature
138 eventAngles[0] = 0;
139 // this value would be used in case of front-only
140 eventAngles[1] = 0;
141 } else {
142 // Rotate the trigger around so that the sync point is at position 0
144
145 // Compute this tooth's position within the trigger definition
146 // (wrap, as the trigger def may be smaller than total trigger length)
147 auto triggerDefinitionIndex = wrappedIndex % triggerShapeLength;
148
149 // Compute the relative angle of this tooth to the sync point's tooth
151
153 // Wrap the angle back in to [0, 720)
155
157 criticalAssertVoid(triggerDefinitionIndex < triggerShapeLength, "trigger shape fail");
159
160 // In case this is a rising event, replace the following fall event with the rising as well
164 }
165 } else {
167 }
168 }
169 }
170}
angle_t eventAngles[2 *PWM_PHASE_MAX_COUNT]
Definition trigger_structure.h:268
int triggerShapeSynchPointIndex
Definition trigger_structure.h:231
@ CUSTOM_TRIGGER_SYNC_ANGLE_RANGE
@ CUSTOM_TRIGGER_SYNC_ANGLE2
@ CUSTOM_TRIGGER_CYCLE
@ CUSTOM_TRIGGER_SYNC_ANGLE
void wrapAngle(angle_t &angle, const char *msg, ObdCode code)
Definition trigger_structure.cpp:43
Referenced by TriggerCentral::prepareTriggerShape().
Here is the call graph for this function:
Here is the caller graph for this function:
Field Documentation
◆ eventAngles
| angle_t TriggerFormDetails::eventAngles[2 *PWM_PHASE_MAX_COUNT] |
These angles are in event coordinates - with synchronization point located at angle zero. These values are pre-calculated for performance reasons.
Definition at line 268 of file trigger_structure.h.
Referenced by InstantRpmCalculator::calculateInstantRpm(), TriggerWaveform::findAngleIndex(), TriggerCentral::findNextTriggerToothAngle(), TriggerCentral::handleShaftSignal(), prepareEventAngles(), and triggerShapeInfo().
The documentation for this class was generated from the following files:
- controllers/trigger/decoders/trigger_structure.h
- controllers/trigger/trigger_decoder.cpp