Detailed Description
Definition in file board_configuration.cpp.
Functions | |
| static void | setInjectorPins () |
| static void | setIgnitionPins () |
| static void | setupDefaultSensorInputs () |
| static void | hellen112_17_boardConfigOverrides () |
| static void | hellen112_17_boardDefaultConfiguration () |
| Board-specific configuration defaults. | |
| int | getBoardMetaOutputsCount () |
| Gpio * | getBoardMetaOutputs () |
| int | getBoardMetaDcOutputsCount () |
| void | setup_custom_board_overrides () |
Variables | |
| static Gpio | OUTPUTS [] |
Function Documentation
◆ getBoardMetaDcOutputsCount()
| int getBoardMetaDcOutputsCount | ( | ) |
Definition at line 153 of file board_configuration.cpp.
153 {
154 return 1;
155}
◆ getBoardMetaOutputs()
| Gpio * getBoardMetaOutputs | ( | ) |
Definition at line 149 of file board_configuration.cpp.
◆ getBoardMetaOutputsCount()
| int getBoardMetaOutputsCount | ( | ) |
Definition at line 145 of file board_configuration.cpp.
◆ hellen112_17_boardConfigOverrides()
|
static |
Definition at line 46 of file board_configuration.cpp.
46 {
47 // rev A needs EN pin but newer revisions would potentially not use it
48 setHellenMegaEnPin();
49 setHellenVbatt();
50
53 setHellenCan();
54
56
59
60 //ETB1
61 // PWM pin
63 // DIR pin
65 // Disable pin
67}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:81
void setHellenMegaEnPin(bool enableBoardOnStartUp)
Definition hellen_common.cpp:163
void setDefaultHellenAtPullUps(float pullup=HELLEN_DEFAULT_AT_PULLUP)
Definition hellen_logic.h:101
Gpio directionPin1
Gpio disablePin
Gpio controlPin
dc_io etbIo[ETB_COUNT]
brain_input_pin_e triggerInputPins[TRIGGER_INPUT_PIN_COUNT]
brain_input_pin_e camInputs[CAM_INPUTS_COUNT]
Referenced by setup_custom_board_overrides().
Here is the call graph for this function:
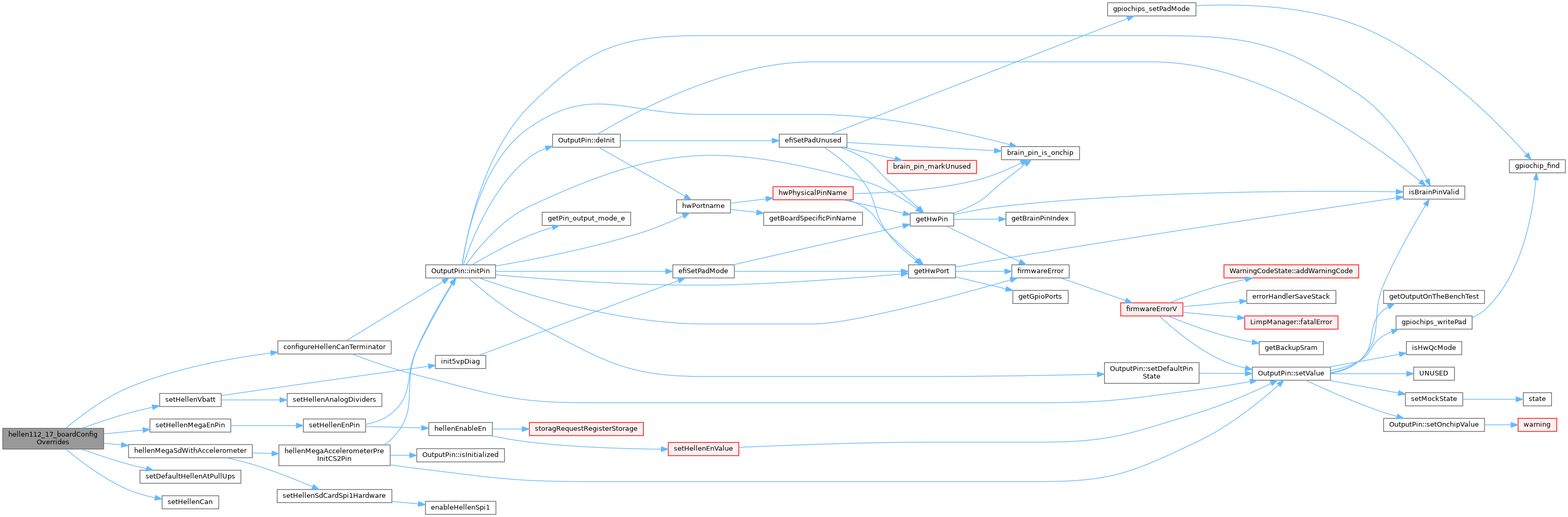
Here is the caller graph for this function:

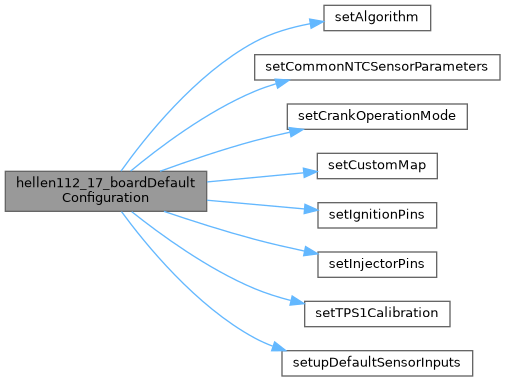
◆ hellen112_17_boardDefaultConfiguration()
|
static |
Board-specific configuration defaults.
Definition at line 76 of file board_configuration.cpp.
76 {
77 setInjectorPins();
78 setIgnitionPins();
79
80 // not override since sometimes we have issues?
81// setHellenMMbaro();
82
84
86
89
91// engineConfiguration->idle.solenoidPin = Gpio::H144_LS_6;
92// engineConfiguration->fanPin = Gpio::H144_OUT_IO12;
94// engineConfiguration->malfunctionIndicatorPin = Gpio::H144_OUT_IO7;
95
96 // how come this is not denso 183?!
98
99// engineConfiguration->brakePedalPin = Gpio::H144_IN_CAM;
100// engineConfiguration->acRelayPin = Gpio::H144_LS_5;
101// engineConfiguration->tachOutputPin = Gpio::H144_OUT_IO10;
102 // A/C switch on k-line
103
104 // "required" hardware is done - set some reasonable defaults
105 setupDefaultSensorInputs();
106
108
109 // Some sensible defaults for other options
110 setCrankOperationMode();
111
112 setAlgorithm(engine_load_mode_e::LM_SPEED_DENSITY);
113
115
118
119 setTPS1Calibration(100, 650);
120 //hellenWbo();
121}
void setTPS1Calibration(uint16_t tpsMin, uint16_t tpsMax)
Definition default_base_engine.cpp:457
void setCustomMap(float lowValue, float mapLowValueVoltage, float highValue, float mapHighValueVoltage)
Definition default_base_engine.cpp:470
bool enableSoftwareKnock
output_pin_e fuelPumpPin
ThermistorConf iat
dc_function_e etbFunctions[ETB_COUNT]
ThermistorConf clt
output_pin_e mainRelayPin
Gpio canRxPin
bool displayLogicLevelsInEngineSniffer
injector_compensation_mode_e injectorCompensationMode
Gpio canTxPin
void setCommonNTCSensorParameters(ThermistorConf *thermistorConf)
Definition thermistors.cpp:33
Referenced by setup_custom_board_overrides().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ setIgnitionPins()
|
static |
Definition at line 21 of file board_configuration.cpp.
21 {
26}
output_pin_e ignitionPins[MAX_CYLINDER_COUNT]
◆ setInjectorPins()
|
static |
Definition at line 14 of file board_configuration.cpp.
14 {
19}
output_pin_e injectionPins[MAX_CYLINDER_COUNT]
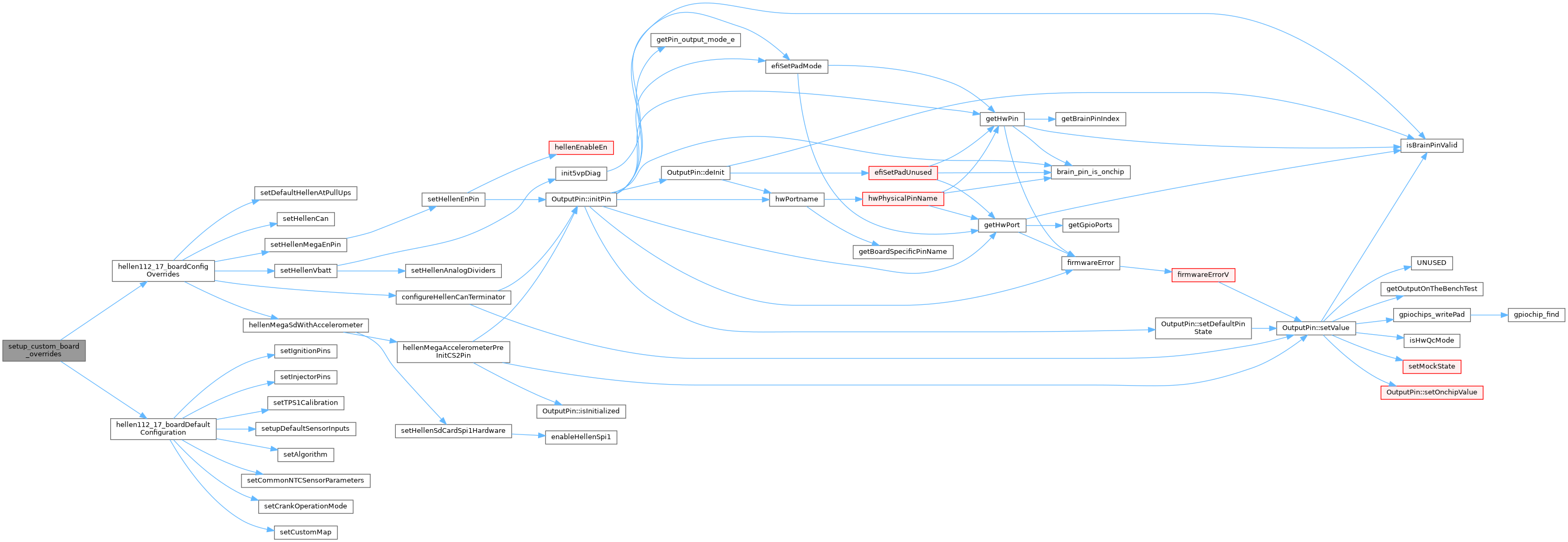
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 157 of file board_configuration.cpp.
157 {
160}
std::optional< setup_custom_board_overrides_type > custom_board_ConfigOverrides
Definition engine_configuration.cpp:71
std::optional< setup_custom_board_overrides_type > custom_board_DefaultConfiguration
Definition engine_configuration.cpp:70
static void hellen112_17_boardConfigOverrides()
Definition board_configuration.cpp:46
static void hellen112_17_boardDefaultConfiguration()
Board-specific configuration defaults.
Definition board_configuration.cpp:76
Here is the call graph for this function:
◆ setupDefaultSensorInputs()
|
static |
Definition at line 28 of file board_configuration.cpp.
28 {
30
33
34 setPPSInputs(MM100_IN_PPS_ANALOG, MM100_IN_AUX2_ANALOG);
35
36
38
40
42}
void setPPSInputs(adc_channel_e pps1, adc_channel_e pps2)
Definition default_base_engine.cpp:447
air_pressure_sensor_config_s sensor
adc_channel_e adcChannel
adc_channel_e hwChannel
adc_channel_e tps1_1AdcChannel
MAP_sensor_config_s map
brain_input_pin_e vehicleSpeedSensorInputPin
adc_channel_e tps1_2AdcChannel
Here is the call graph for this function:

Variable Documentation
◆ OUTPUTS
|
static |
Initial value:
= {
Gpio::MM100_INJ1,
Gpio::MM100_INJ2,
Gpio::MM100_INJ3,
Gpio::MM100_INJ4,
Gpio::MM100_IGN1,
Gpio::MM100_IGN2,
Gpio::MM100_IGN3,
Gpio::MM100_IGN4,
Gpio::MM100_INJ6,
Gpio::MM100_INJ5,
Gpio::MM100_INJ7,
Gpio::MM100_IGN8,
Gpio::MM100_OUT_PWM3,
Gpio::MM100_IGN7,
Gpio::MM100_OUT_PWM4,
Gpio::MM100_OUT_PWM5,
Gpio::MM100_IGN5,
Gpio::MM100_IGN6,
Gpio::MM100_INJ8,
}
Definition at line 123 of file board_configuration.cpp.
123 {
124 Gpio::MM100_INJ1, // 244 injector output 1
125 Gpio::MM100_INJ2, // 242 injector output 2
126 Gpio::MM100_INJ3, // 243 injector output 3
127 Gpio::MM100_INJ4, // 245 injector output 4
128 Gpio::MM100_IGN1, // 256 Coil 1
129 Gpio::MM100_IGN2, // 253 Coil 2
130 Gpio::MM100_IGN3, // 254 Coil 3
131 Gpio::MM100_IGN4, // 255 Coil 4
132 Gpio::MM100_INJ6, // 9 235 Low Side Output
133 Gpio::MM100_INJ5, // 101 low side 1.5A output
134 Gpio::MM100_INJ7, // 102 low side 1.5A output
135 Gpio::MM100_IGN8, // 12 115 Main Relay
136 Gpio::MM100_OUT_PWM3, // 131 Relay Output
137 Gpio::MM100_IGN7, // 140 Relay Output
138 Gpio::MM100_OUT_PWM4, // 141 Engine Radiator Fan
139 Gpio::MM100_OUT_PWM5, // 142 Fuel Pump Relay
140 Gpio::MM100_IGN5, // 151 relay output
141 Gpio::MM100_IGN6, // 18 152 relay output
142 Gpio::MM100_INJ8, // 246 low side 1.5A output
143};