#include <ignition_state.h>
Public Member Functions | |
| void | updateDwell (float rpm, bool isCranking) |
| void | updateAdvanceCorrections (float engineLoad) |
| floatms_t | getDwell () const |
| angle_t | getWrappedAdvance (const float rpm, const float engineLoad) |
| angle_t | getTrailingSparkAngle (const float rpm, const float engineLoad) |
| angle_t | getSparkHardwareLatencyCorrection () |
Static Public Member Functions | |
| static angle_t | getInterpolatedIgnitionAngle (float rpm, float ignitionLoad) |
| static angle_t | getInterpolatedIgnitionTrim (size_t cylinderNumber, float rpm, float ignitionLoad) |
Private Member Functions | |
| angle_t | getAdvance (float rpm, float engineLoad) |
| floatms_t | getSparkDwell (float rpm, bool isCranking) |
 Data Fields inherited from
Data Fields inherited from Detailed Description
Definition at line 5 of file ignition_state.h.
Member Function Documentation
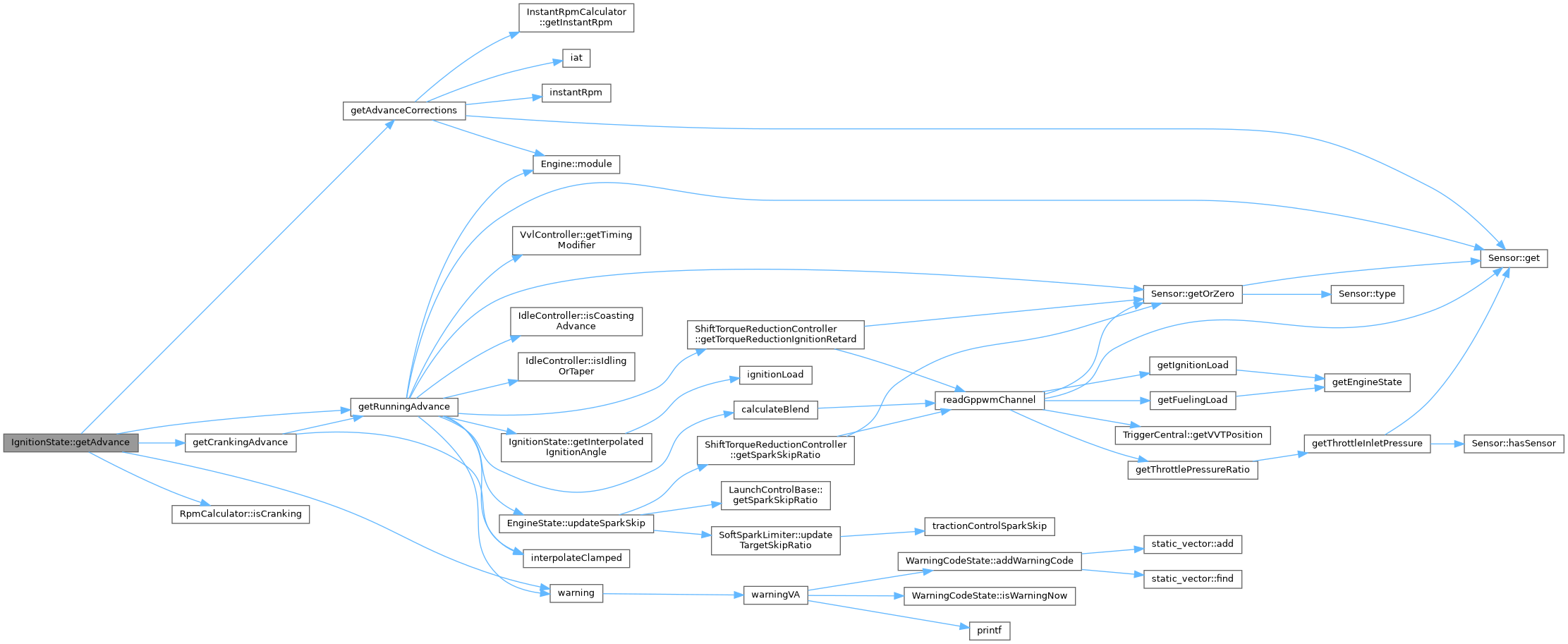
◆ getAdvance()
Definition at line 211 of file ignition_state.cpp.
Referenced by getWrappedAdvance().

◆ getDwell()
| floatms_t IgnitionState::getDwell | ( | ) | const |
Definition at line 342 of file ignition_state.cpp.
Referenced by fireSparkAndPrepareNextSchedule(), getCoilDutyCycle(), initializeIgnitionActions(), onTriggerEventSparkLogic(), and updateDwell().

◆ getInterpolatedIgnitionAngle()
Definition at line 368 of file ignition_state.cpp.
Referenced by getRunningAdvance().


◆ getInterpolatedIgnitionTrim()
|
static |
Definition at line 376 of file ignition_state.cpp.
Referenced by getCylinderIgnitionTrim().


◆ getSparkDwell()
- Returns
- Spark dwell time, in milliseconds. 0 if tables are not ready.
Definition at line 307 of file ignition_state.cpp.
Referenced by updateDwell().


◆ getSparkHardwareLatencyCorrection()
| angle_t IgnitionState::getSparkHardwareLatencyCorrection | ( | ) |
Definition at line 358 of file ignition_state.cpp.
Referenced by EngineState::periodicFastCallback().

◆ getTrailingSparkAngle()
Definition at line 346 of file ignition_state.cpp.
Referenced by EngineState::periodicFastCallback().

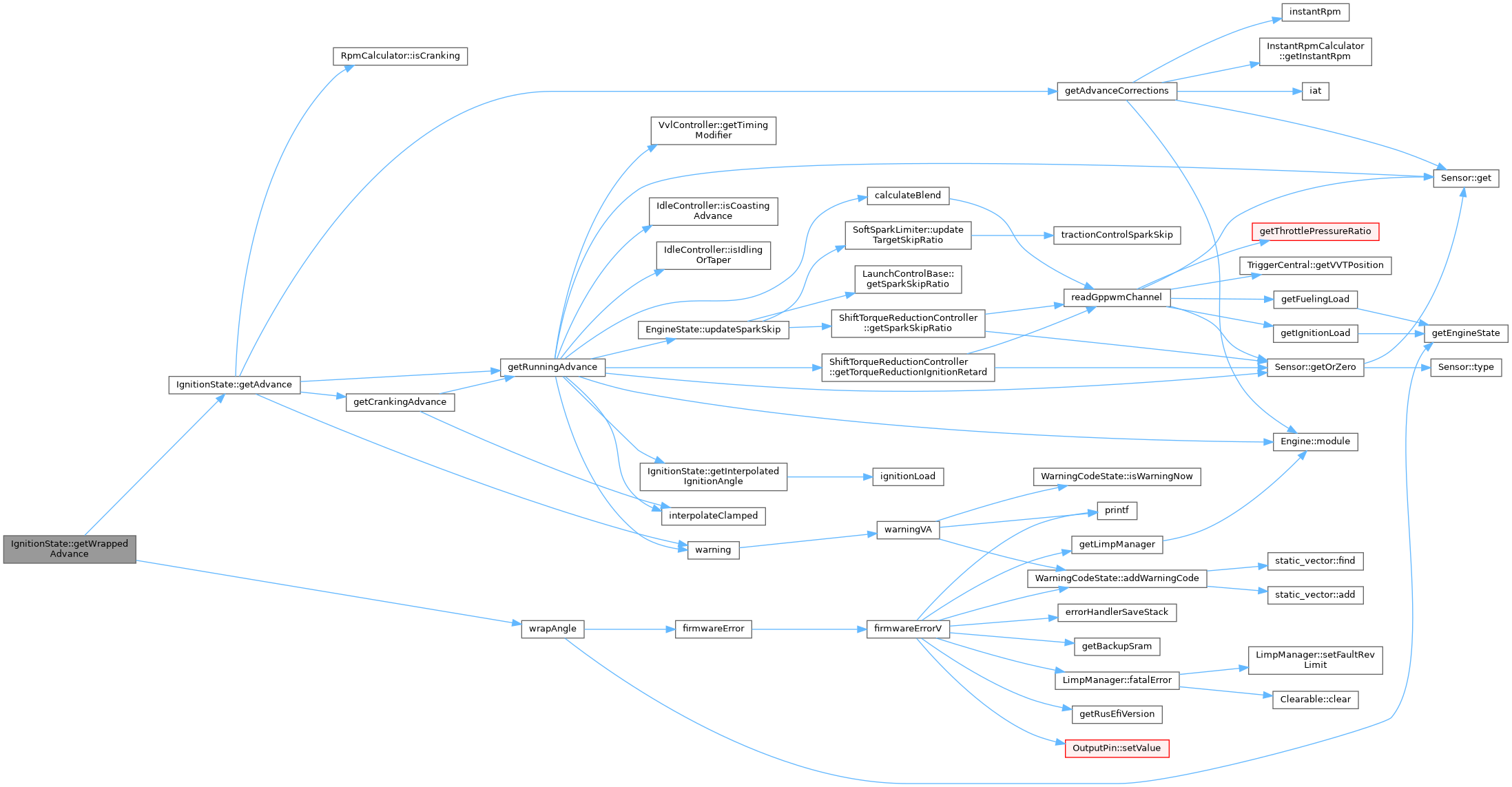
◆ getWrappedAdvance()
Definition at line 250 of file ignition_state.cpp.
Referenced by EngineState::periodicFastCallback().

◆ updateAdvanceCorrections()
| void IgnitionState::updateAdvanceCorrections | ( | float | engineLoad | ) |
Definition at line 160 of file ignition_state.cpp.
Referenced by EngineState::periodicFastCallback().


◆ updateDwell()
Definition at line 337 of file ignition_state.cpp.
Referenced by EngineState::periodicFastCallback().


The documentation for this class was generated from the following files:
- controllers/algo/ignition/ignition_state.h
- controllers/algo/ignition/ignition_state.cpp